【工程训练中心】S-JZ0005三维激光扫描仪
发布时间:2025-09-09 13:02
信息点相关内容(建筑设备类)
一、名称
三维激光扫描仪
二、简介
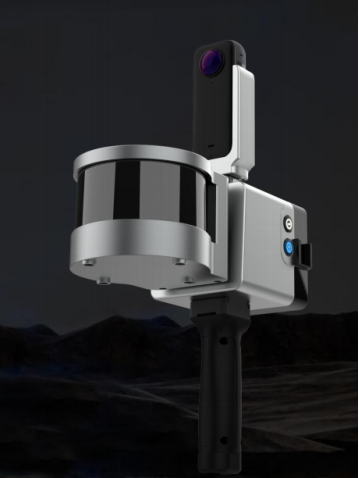
SLAM RS100i 是一款由 GoSLAM 推出的三维激光扫描仪产品,该设备采用 SLAM(实时定位与建图)技术,无需依赖 GPS 等 GNSS 定位,能够在室内外等未知空间环境移动过程中,实现自身定位以及增量式三维地图构建。 三维激光扫描仪通过激光测距与角度编码技术,突破传统单点测量的局限,实现高效率、高精度的三维数据采集。
三、图片

四、详细介绍
其核心原理可分为以下步骤:
1.激光测距
飞行时间法(ToF):测量激光脉冲从发射到反射回接收器的时间,结合光速计算距离(适用于长距离测量,如脉冲式扫描仪测程可达6公里)。
相位差法:通过调制激光信号的相位变化计算距离(适用于短距离高精度测量,如相位式扫描仪测程约百米,精度可达毫米级)。
三角测距法:基于激光光斑在传感器上的位移计算距离(常用于近距离精密测量,如手持式扫描仪精度达0.055mm)。
2. 角度编码
内部精密马达驱动激光束在水平和垂直方向高速扫描,角度编码器实时记录每个激光束的方位(水平角α、天顶距θ),结合距离数据计算空间坐标(X, Y, Z)。
3. 点云生成
单次扫描可获取数百万个点的三维坐标,同时记录反射强度(反映材质特性)和颜色信息(RGB),形成密集的“点云”数据,为三维建模提供基础。